MathWorks has released an update to Simulink Real-Time that will enhance rapid control prototyping and hardware-in-the-loop (HIL) testing with Model-Based Design.

In Release 2020b, Simulink Real-Time has been enabled with the QNX Neutrino RTOS, a multi-process 64-bit POSIX-compliant real-time operating system from BlackBerry. The QNX RTOS is widely used in life and safety-critical systems for vehicles, medical devices, industrial controls, rail, robotics and aerospace & defence.
The update builds on the existing Simulink Real-Time and Speedgoat integration, enabling engineers to extend their Simulink models with I/O driver blocks, automatically build real-time applications, create instrumentation, and perform interactive or automated runs on a target computer.
Engineers will be able to replace a physical system such as a vehicle, aircraft, or robot with a real-time simulation of a virtual system to reduce the cost of testing. The QNX Neutrino RTOS enables new workflows, making real-time computing problems easier to solve, particularly when multiple tasks compete for a system’s resources.
Commenting Grant Courville, VP, products and strategy, BlackBerry QNX, said,
“QNX is the RTOS of choice for mission-critical embedded systems, and countless engineers across a wide range of industries rely on MathWorks’ Simulink Real-Time for simulation and Model-Based Design. This integration will allow teams to work in their preferred environment and reap the benefits that the QNX Neutrino RTOS has to offer from design to deployment.”
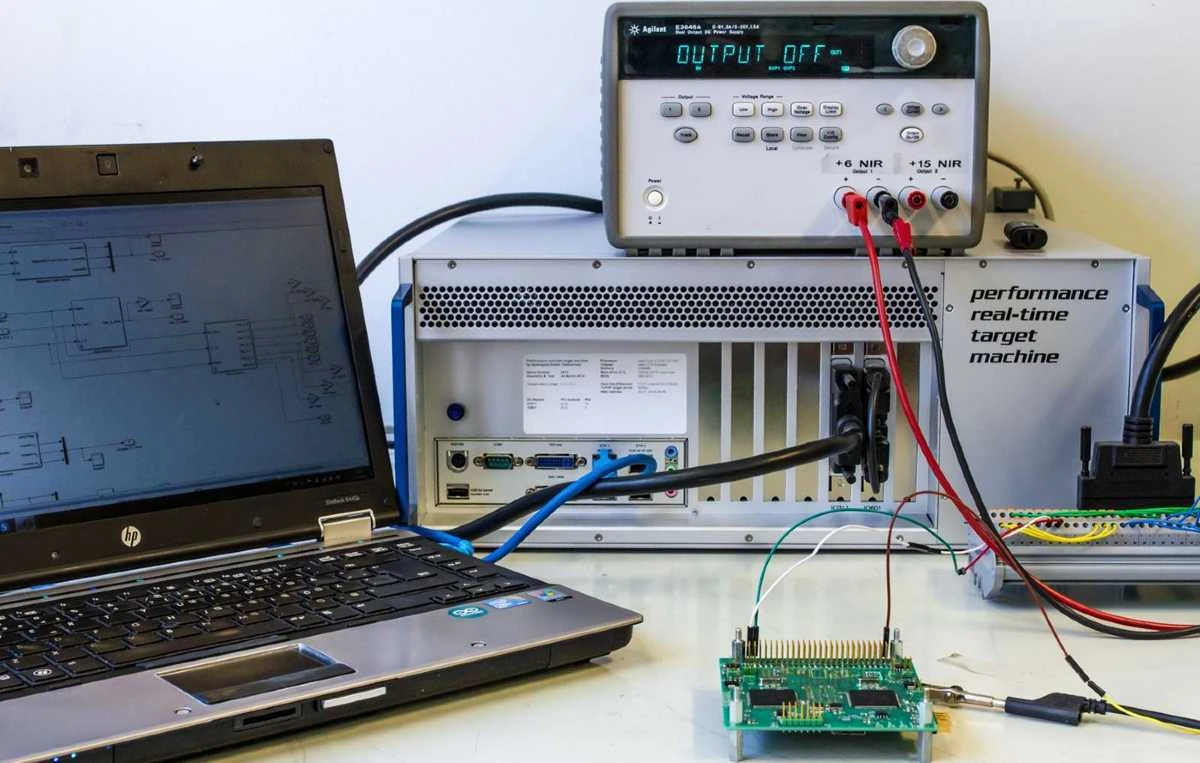
Simulink Real-Time™ lets you create real-time applications from Simulink® models and run them on Speedgoat target computer hardware connected to your physical system. It is designed for real-time simulation and testing tasks, including rapid control prototyping (RCP), DSP and vision system prototyping, and hardware-in-the-loop (HIL) simulation.
With Simulink Real-Time you can extend your Simulink models with Speedgoat I/O driver blocks and automatically build real-time applications. Tests can be automated or run interactively on a Speedgoat target computer equipped with a real-time kernel, multicore CPUs, I/O and protocol interfaces, and FPGAs.
Downloadable the Simulink Real-Time Target Support package includes development tools and run-time components, including a cross-compiler provided at no additional cost, to compile and run real-time applications.
Additional capabilities now available in Simulink Real-Time include:
- New Simulink Real-Time Explorer and graphical instrument panels and applications: Control and configure a real-time application with a new Simulink Real-Time Explorer, and use App Designer to create graphical instrument panels and custom applications
- Support for test engineering workflows: Develop test and calibration apps and scripts that interact with a real-time application using only MATLAB and Simulink Real-Time
- Upgrade Advisor for Simulink Real-Time: Automatically upgrade models created in prior versions to take advantage of the new 64-bit RTOS
- New File Log block: Enable and disable logging during real-time execution, log multiple runs while disconnected from MATLAB, and import logged data to MATLAB.
“Engineers working on complex embedded systems are constantly looking for ways to improve real-time simulation and testing with Model-Based Design,” said Jay Abraham, manager – verification products, MathWorks.
“With the enablement of the QNX Neutrino RTOS, they can now work with Simulink Real-Time to address design challenges that require streamlined solutions for rapid control prototyping and HIL testing.”
